タグ: raspberry pi
-
温度センサーIC LM19を使う
ここでは温度センサーIC LM19(National Semiconductor)を使ってRaspberry piで温度監視を行う事例を紹介します。 LM19仕様 パッケージ:TO-92 動作電源電圧:2.4V~5.5V […]
-
Raspberry piにshut downボタンを付ける
Raspberry piを停止する際はコンソールからshut downを行う必要が有ります. pi@raspberrypi ~ $sudo halt Raspberry piの仕様から端末に繋ぐことなくスタンドアロンで運 […]
-

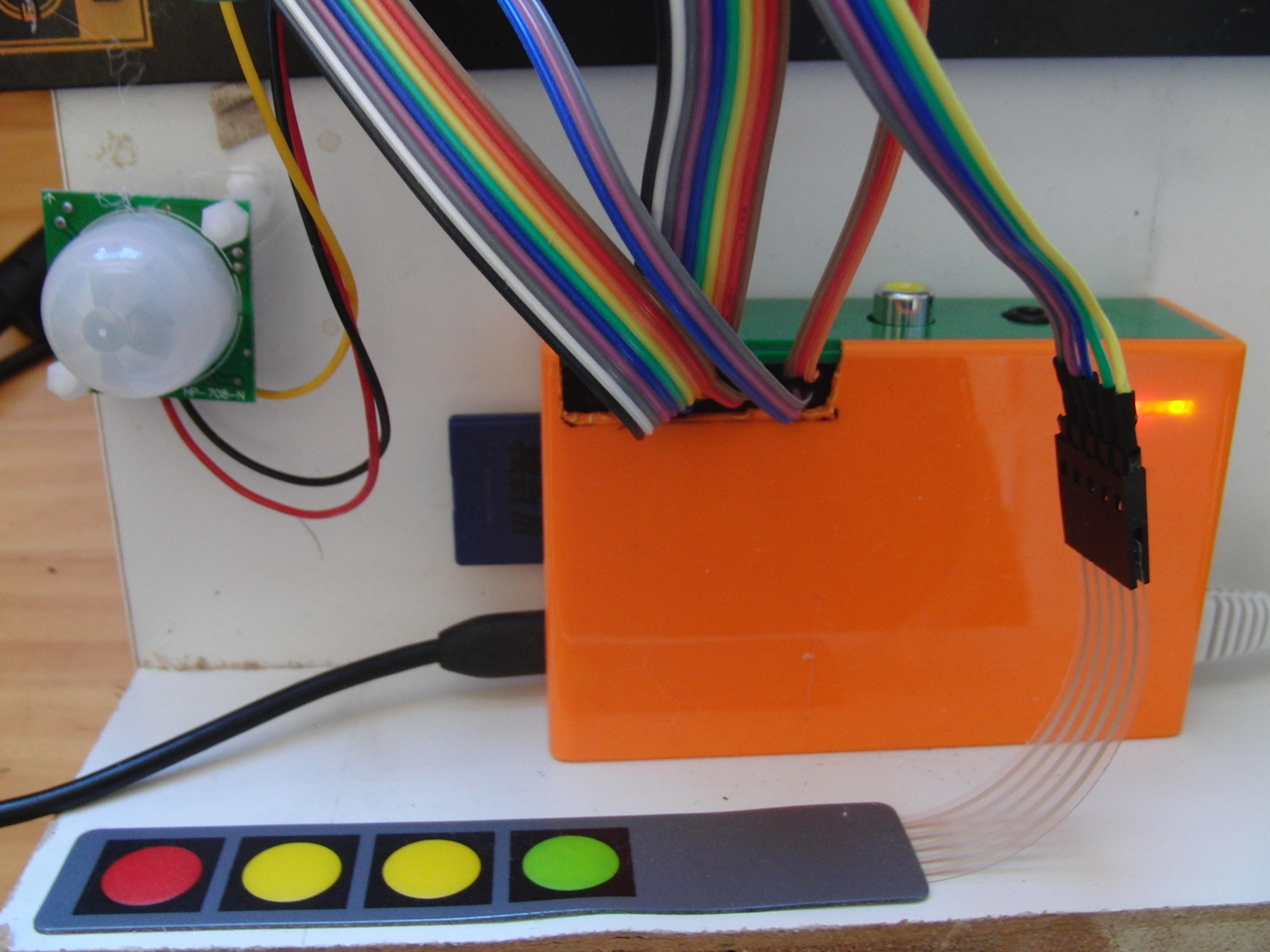
動体検出にPIRセンサーを
動体検出には幾つかの方法が有ります。まずカメラ画像の中から動いている物体を検出するものがあります。これは人でも車でもカメラが見ることのできる動いているものを検出します.カメラの性能にも依存しますので例えば暗い時のようにカ […]
-
IOError: [Errno 5] Input/output error
Raspberry piでデバイスとI2C通信をしている時に IOError: [Errno 5] Input/output error に出会う時が有ります.基本的な設定が済んでいるものとして、このようなエラーが出る場 […]
-
シリアルインタフェイス I2CとSPIの選択
センサーや表示装置などのデバイスモジュールは多くの種類があり小型になり、また手頃な価格で入手できるようになりました。これらをマイコンまたはRaspberry piなどの小型Linux機で扱うのに容易なシリアルインターフェ […]